youyeetoo FHL-LD19 Lidar szenzor - 12 méteres (39 láb) 360°-os hatótávolságú - dió méretű, 30K lux fényállóságú - ROS/ROS2/C/C++ SDK Raspberry oktatóanyag robotokhoz, drón SLAM, Lidar szkenner készlet adapterrel
Új termék gyári, bontott csomagolásban (Rtsz: Pl/kd16)
Erről a termékről
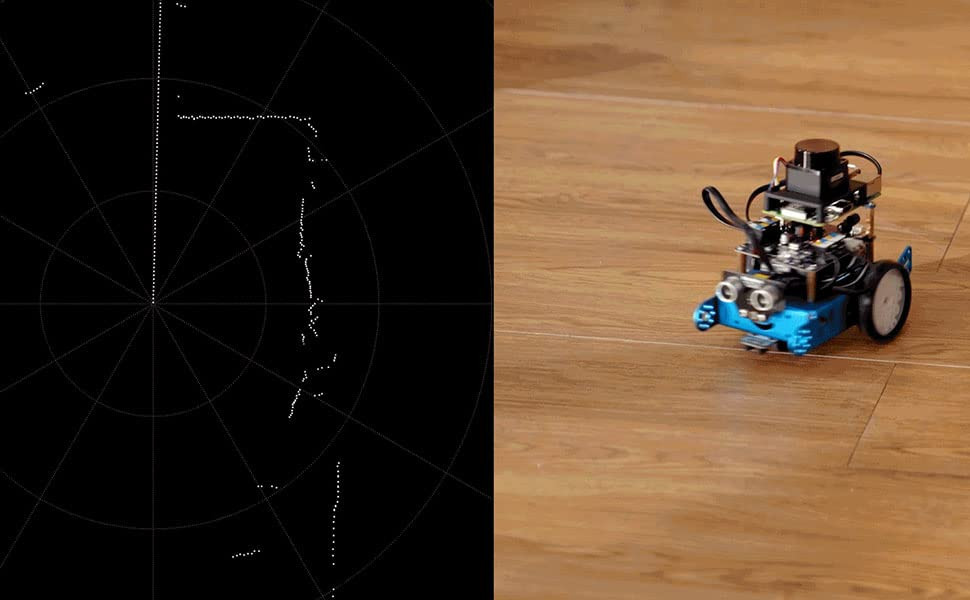
A youyeetoo FHL‑LD19 egy kompakt, nagy fényállóságú Time‑of‑Flight (TOF) alapú LiDAR érzékelő, amely 360°-os pásztázást tesz lehetővé akár 12 méteres körzetben. Ideális robotok, drónok, SLAM rendszerek és egyéb autonóm alkalmazások számára, amelyek nagy pontosságra, gyors responszra és megbízható szoftveres háttérre építenek.
Műszaki tulajdonságok
Mérési tartomány: 0,02 m – 12 m (70%-os visszaverődés esetén)
Mérési gyakoriság: akár 4500 Hz, pásztázási sebesség ~10 Hz
Pontosság: ±45 mm átlagos hiba (0,3–12 m tartományban), szórás: 10 mm
Felbontás: 15 mm
Szkan terület: 360° teljes kör
Szögpontosság: ±2°, szögfelbontás ~0,8° @ 10 Hz
Fényállóság: akár 30 000 lux kültéri és beltéri környezetben
Működés: 5 V tápfeszültséggel (kb. 180 mA áramfelvétel, ~0,9 W teljesítmény)
Interfész: UART (3,3 V logikai szinten), adatátvitel: 230 400 baud
Méret & súly: 38,6 × 38,9 × 33,5 mm; kb. 47 g
Hőmérséklet-tűrés: –10 °C … +40 °C működéskor, –30 °C … +70 °C tároláskor
Motor: nagy élettartamú, kefe nélküli forgómotor
Fejlesztői támogatás & alkalmazhatóság
Szoftveres integráció: SDK elérhető ROS / ROS2, valamint C / C++ nyelveken. Részletes Raspberry Pi tutorial is szerepel a csomagban
Használati területek:
Robot navigáció, akadályelkerülés (SLAM)
Drónos térképezés, környezetmodellezés
Oktatás, kutatás, IoT megoldások
Dokumentáció: Mellékelve: használati útmutató, fejlesztői kézikönyv, SDK, 3D modell és GYIK
Összefoglalás
A youyeetoo FHL‑LD19 kiváló választás, ha stabil, nagy felbontású és széles körben alkalmazható LiDAR megoldást keresel robotikai vagy autonóm projekthez. Kompaktsága, megbízhatósága, ROS kompatibilitása és részletes dokumentációja (beleértve a Raspberry Pi használatot is) megfelelő hátteret biztosít mind hobbistáknak, mind fejlesztőknek.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}